

Halo STEAM-ers! Kali ini Pak Koko akan mengajak untuk belajar sains sambil bermain menjadi insinyur pembuat tangan robot. Wow. Iya, Tangan Robot! Bagaimana ya caranya membuat tangan robot yang bisa bergerak seperti tangan kita / manusia? Yuk, kita coba, insinyur cilik!
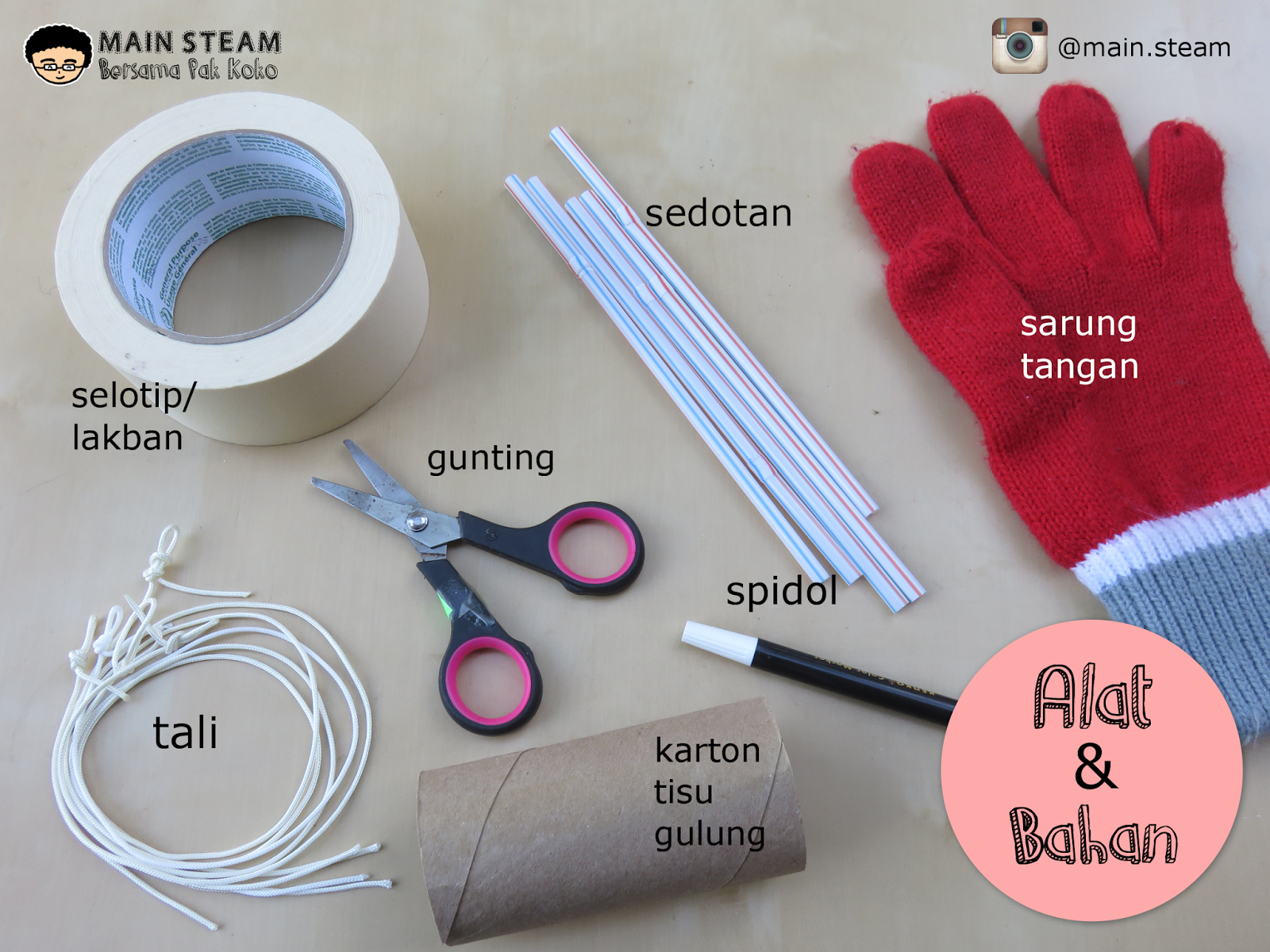
Cari dan siapkan alat dan bahan berikut di rumahmu.
Semua sudah siap? Ikuti langkah-langkahnya pada video berikut ini.
Bagaimana? Apakah Tangan Robot buatanmu dapat bergerak seperti tanganmu?
KOK BISA YA?
Rahasianya... mimik!
Apa sih mimik? Mimik adalah peniruan gerakan dan bentuk anggota tubuh. Tangan robot yang baru saja kita buat adalah tiruan (mimik) dari bentuk dan gerakan tangan manusia. Kamu tentu tahu, robot dibuat dengan meniru manusia. Atau disebut juga mimik manusia.
Di sekitarmu, masih ada banyak lagi benda-benda, mesin-mesin, dan teknologi ciptaan manusia yang meniru makhluk hidup ciptaan Tuhan. Contohnya, pesawat terbang merupakan mimik dari burung. Pesawat meniru bentuk anggota tubuh burung yang memiliki sayap. Juga meniru cara kerja burung untuk terbang. Kalkulator dan komputer merupakan mimik dari otak manusia. Keduanya meniru cara manusia berpikir. Walau begitu, alat-alat ciptaan manusia (mimik) ini belum mampu menandingi kecanggihan manusia dan makhluk hidup ciptaan Tuhan.
Nah, insinyur meniru bentuk tangan manusia dan cara kerjanya dalam membuat tangan robot. Sehingga tangan robot dapat berfungsi dengan baik sebagaimana tangan manusia.
Bagaimana sih bentuk struktur tangan manusia dan fungsinya?
Bagian-bagian tangan manusia terdiri dari kulit, tulang, otot, sendi (ruas), tendon, dan ligamen. Tapi yang dapat kita lihat hanya kulit. Sisanya berada di dalam kulit.
Coba kamu rasakan tanganmu dengan memijit atau menekannya.
Bagian yang keras adalah tulang.
Bagian yang lunak adalah otot. Kamu tentu dapat merasakan bahwa tulang ada dibalik otot. Iya, otot menempel pada tulang.
Bagian dari tanganmu yang dapat ditekuk adalah sendi (ruas). Sendi (ruas) merupakan pertemuan tulang dengan tulang.
Tendon dan ligamen tidak bisa kamu rasakan dengan menekan atau memijit. Tapi kamu dapat membayangkannya. Tendon adalah penghubung antara otot dan tulang. Sementara Ligamen adalah penghubung antara tulang dan tulang lainnya.
Bagaimana cara kerja tangan manusia?
Ketika otakmu memberi perintah untuk menggerakkan jari, maka otot di tanganmu akan bekerja menarik tendon. Karena tendon mengubungkan otot dengan tulang, maka ketika otot menarik tendon, secara otomatis tulang ikut tertarik. Saat tulang-tulang di jarimu ditarik, maka tulang jari-jarimu akan menekuk di bagian sendi (ruas) nya. Sehingga jari-jarimu dapat menekuk untuk menggenggam sesuatu atau melakukan tugas lainnya.
Nah, ayo bandingkan dengan tangan robot yang baru saja kita buat. Sedotan adalah mimik dari tulang tanganmu. Lubang-lubang di sedotan yang kamu gunting adalah sendi (ruas) nya. Tali yang kamu masukkan ke dalam sedotan adalah tendon-nya. Lalu, ototnya adalah tanganmu sendiri.
Sedotan = tulang
Tali = tendon
Lubang pada sedotan = sendi (ruas)
Tanganmu = otot
Saat tanganmu yang berfungsi sebagai otot Tangan Robot menarik tali (yang berfungsi sebagai tendon Tangan Robot), maka secara otomatis tali (tendon) menggerakkan sedotan (yang berfungsi sebagai tulang). Ingat, tendon adalah penghubung antara otot dan tulang. Saat tendon (tali) menggerakkan tulang (sedotan), tulang-tulang tanganmu (sedotan) akan menekuk pada bagian lubang-lubang yang kamu buat (ruas / sendi Tangan Robot). Sehingga jari-jari tangan robotmu dapat bergerak mencengkeram!
Coba gunakan tangan robotmu untuk mengambil sesuatu. Dapatkah tangan robotmu bekerja meniru tangan manusia?
Selamat bermain, insinyur cilik!







No comments:
Post a Comment